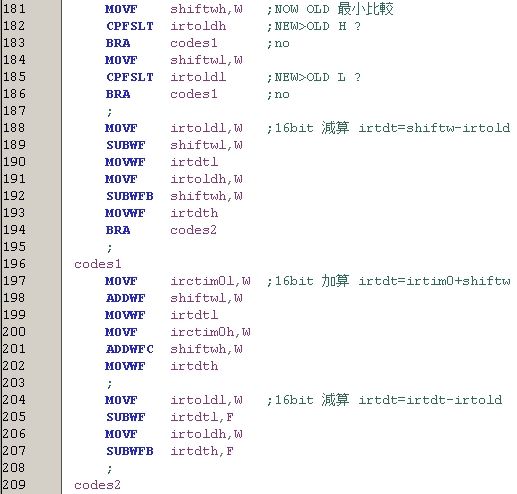
RRP1320-1-02 では予め内臓 EEPROM に記録した赤外線リモコンの受信コードを元に、押されたボタンを特定して所定のサブルーチンを CALL します。 EEPROM に初期値を書き込む方法について説明してみます。 <PICデバイス=18F1320>
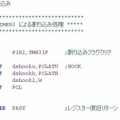
EEPROM に初期設定を書き込む際には、下図のようにアセンブラの DE 疑似命令を使います。 プログラム・メモリーにテーブルを準備する時に使う DB 疑似命令と同様に使えるようです。

ORG 疑似命令で先頭を指定して、DE 疑似命令を並べます。 PIC18F シリーズでは 0F00000H ~ 0F000FFH の 256byte を指定します。 上図のように指定した結果は、EEPROM ウィンドウでも確認できます。
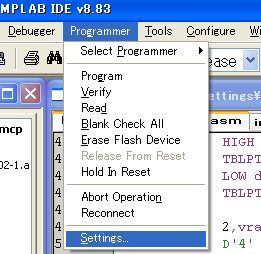
PICkit3 をプログラマーに設定して PIC に書き込む際には、Programmer → Settings で表示される PICkit3 Settings ウィンドウの Program Memory タグにある Memories EEPROM にチェックが入っていることを確認する必要があります。
DE 疑似命令を使うと下図の通り、自動的にチェックが入るようです。

初めは DE 疑似命令を知らずに、プログラム・メモリーに DB 疑似命令でテーブルを準備して、自前のプログラムで EEPROM に転送していたのですが、一般的でない上に EEPROM ウィンドウに反映されない為、DE 疑似命令による初期設定に変更しました。
EEPROM に転送するプログラムは書き込みとべリファイの為の読み出しを行うものですが、動作中にEEPROMを書き換える時に応用できると思いますので、別の記事「EEPROM 読み書き」で動作確認済みソースを紹介しています。
赤外線リモコン受信の関連記事インデックスはこちら → 「赤外線リモコン受信」
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。
EEPROM に初期設定を書き込む際には、下図のようにアセンブラの DE 疑似命令を使います。 プログラム・メモリーにテーブルを準備する時に使う DB 疑似命令と同様に使えるようです。
ORG 疑似命令で先頭を指定して、DE 疑似命令を並べます。 PIC18F シリーズでは 0F00000H ~ 0F000FFH の 256byte を指定します。 上図のように指定した結果は、EEPROM ウィンドウでも確認できます。
PICkit3 をプログラマーに設定して PIC に書き込む際には、Programmer → Settings で表示される PICkit3 Settings ウィンドウの Program Memory タグにある Memories EEPROM にチェックが入っていることを確認する必要があります。
DE 疑似命令を使うと下図の通り、自動的にチェックが入るようです。
初めは DE 疑似命令を知らずに、プログラム・メモリーに DB 疑似命令でテーブルを準備して、自前のプログラムで EEPROM に転送していたのですが、一般的でない上に EEPROM ウィンドウに反映されない為、DE 疑似命令による初期設定に変更しました。
EEPROM に転送するプログラムは書き込みとべリファイの為の読み出しを行うものですが、動作中にEEPROMを書き換える時に応用できると思いますので、別の記事「EEPROM 読み書き」で動作確認済みソースを紹介しています。
赤外線リモコン受信の関連記事インデックスはこちら → 「赤外線リモコン受信」
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。