ブラシローラー型水田除草ロボットのラジコンその他基礎実験にも使う為、XBee-PRO ZB S2Bモジュール(Wireアンテナ)を手配しました。 IEEE 802.15.4 と言う近距離無線通信規格と、ZigBee と言う通信プロトコルによる送受信ユニットで、センサーネットワークやホームネットワーク等で活用が期待されている多様な製品群の一つです。
XBee-PRO ZB S2Bモジュール(Wireアンテナ)
http://akizukidenshi.com/catalog/g/gM-05804/
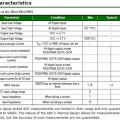
赤外線リモコン(一方通行のコマンド送信)に比べて高機能(双方向通信、情報量大)なリモコンをはじめ、幾つかのツールを作りながら勉強したいと思います。 XBee ( S2B )の電源電圧が 2.7~3.3V であり、電池駆動も視野に入れることから、PICマイコンも 3.3V 以下で動作するものを選び、18F13K22 , 18F23K22 あたりを使おうと考えています。
以下は、一連の記事のインデックスにします。
XBee 実験開始
沢山のコマンドの中から幾つか試し、XBee を介してマイコン同士が通信する方法も見当が付きました。 次はいよいよ PIC 同士の通信を試したいと思います。
XBee ドキュメント類
英語版ですが、ATコマンドやAPIフレームについても詳しく書かれています。 参考書を元に、解らないところや不明確なところを調べる分には私でも理解できそうです。
XBee 3役
3台目の XBee が入荷しました。 これで、コーディネーター、ルーター、エンドポイントと言う3役を同時にネットワークして実験が可能になりました。
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。