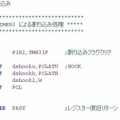
「PWM 3 速度変更」の続きです。 今回は、回路図とノイズ対策の話を書いてPWM関連記事を終わります。 <PICデバイス=18F1320> PWM制御対象はマブチモーター RE-140RA ( FET 2SK2232 でドライブ)です。
PWM関連の実験を終えた、RRP1320-0-7 の回路図は下図の通りです。 図をクリックして別ウィンドウで見ると、定数等も確認出来ると思います。 「音声合成LSI 2」で紹介した通り、回路変更(CPU端子の割り付け変更)を行っています。 RRP1320-0-5 以前のプロジェクトを試す場合はご注意ください。

FET のゲート抵抗漏れを修正しました。 2012/09/20日
LCDコントラスト調整用ボリューム配線の誤記を修正しました。 20012/09/21日
なお、この記事からダウンロード出来る、RRP1320-0-7 は、これまで紹介した全ての機能( LED点滅、LCDに自動転送、RCサーボ、赤外線リモコン受信、温度センサー、音声合成LSI、PWM)を含みます。
今回は、モーターのブラシとコミュテータ間で発声するノイズ対策について紹介します。 購入したままのマブチモーター(RE-140RA )を接続して動作確認するとノイズの影響で回路動作が不安定になります。 目に見える症状は以下の通りです。
(1) 赤外線リモコン受信は休みなくノイズを受信します。
(2) LCDが予定外の表示をすることもあります。
(3) PICkit3 が Failed to get PC. と言うメッセージを表示して Run 出来なくなる。
パソコンと同期が取れなくなったと言うエラーです。
(4) Release 版をプログラムして PICkit3 を切り離しても同様(かえって悪い)です。
頻繁にリセットするようです。
モーターの端子とケースの間にコンデンサを入れるのが一般的な対策ですが、先にモーターの電源を別電源にしました。 それぞれに異なるACアダプターで給電しても効果なし、モーター側を乾電池にしても変りません。
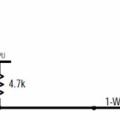
とうとう、モーターの端子とケース間をセラミックコンデンサー(103 0.01uF )で接続したところ、すっかり安定しています。 赤外線リモコンも安定しています。(モーター無しでも稀にノイズ受信していましたから同程度です。)

2本のリード線とケース間に、各々上図のようにコンデンサーを半田付けします。
DCモーターのノイズ対策は、コンデンサーを付けることが先決ですね。
以下で、一連の記事で紹介したソース・ファイル(プロジェクト)をダウンロード出来ます。
LHA書庫です。
http://jyosou-robot.livedoor.biz/pic/RRP1320-0/RRP1320-0-7.lzh
PWM 関連記事のインデックスはこちら → PWM
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。
PWM関連の実験を終えた、RRP1320-0-7 の回路図は下図の通りです。 図をクリックして別ウィンドウで見ると、定数等も確認出来ると思います。 「音声合成LSI 2」で紹介した通り、回路変更(CPU端子の割り付け変更)を行っています。 RRP1320-0-5 以前のプロジェクトを試す場合はご注意ください。

FET のゲート抵抗漏れを修正しました。 2012/09/20日
LCDコントラスト調整用ボリューム配線の誤記を修正しました。 20012/09/21日
なお、この記事からダウンロード出来る、RRP1320-0-7 は、これまで紹介した全ての機能( LED点滅、LCDに自動転送、RCサーボ、赤外線リモコン受信、温度センサー、音声合成LSI、PWM)を含みます。
今回は、モーターのブラシとコミュテータ間で発声するノイズ対策について紹介します。 購入したままのマブチモーター(RE-140RA )を接続して動作確認するとノイズの影響で回路動作が不安定になります。 目に見える症状は以下の通りです。
(1) 赤外線リモコン受信は休みなくノイズを受信します。
(2) LCDが予定外の表示をすることもあります。
(3) PICkit3 が Failed to get PC. と言うメッセージを表示して Run 出来なくなる。
パソコンと同期が取れなくなったと言うエラーです。
(4) Release 版をプログラムして PICkit3 を切り離しても同様(かえって悪い)です。
頻繁にリセットするようです。
モーターの端子とケースの間にコンデンサを入れるのが一般的な対策ですが、先にモーターの電源を別電源にしました。 それぞれに異なるACアダプターで給電しても効果なし、モーター側を乾電池にしても変りません。
とうとう、モーターの端子とケース間をセラミックコンデンサー(103 0.01uF )で接続したところ、すっかり安定しています。 赤外線リモコンも安定しています。(モーター無しでも稀にノイズ受信していましたから同程度です。)

2本のリード線とケース間に、各々上図のようにコンデンサーを半田付けします。
DCモーターのノイズ対策は、コンデンサーを付けることが先決ですね。
以下で、一連の記事で紹介したソース・ファイル(プロジェクト)をダウンロード出来ます。
LHA書庫です。
http://jyosou-robot.livedoor.biz/pic/RRP1320-0/RRP1320-0-7.lzh
PWM 関連記事のインデックスはこちら → PWM
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。