RRP1320-1-04 の温度制御定数は下図のように DE 疑似命令で設定します。 <PICデバイス=18F1320>

最初の設定値、温度制御間隔は1~255の値を入力し、入力値 x 0.5秒が制御間隔になります。 上図の例では、10秒毎に制御出力を更新します。 制御温度の上限及び下限の境界付近では、測定温度が制御範囲の内外を行き来する為、頻繁に制御出力が変化します。 リレー出力などの場合は制御間隔を長めにして接点の動作頻度を落とす必要があります。
次が上限温度で、2桁BCD(06~95)で温度(単位 ℃)を入力します。 三番目が下限温度で同じく(05~94)で単位は℃です。 ただし、上限温度>下限温度に設定する必要があります。
上限温度および下限温度は起動時にテーブル参照(検索)を行い、2桁BCD(温度)から A/D 変換値 HEX を求めてデータ・メモリーに保存し、温度制御に活用しています。
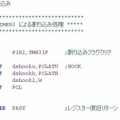
制御間隔毎に測定値を比較し、上限温度と下限温度で仕切られた3つの温度範囲毎に独立した下図サブルーチンを CALL します。
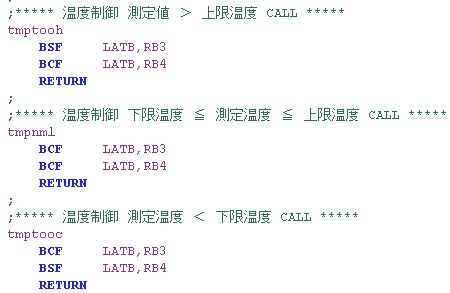
実際にポート出力を変化させて LED を点灯/消灯させているのは上図のプログラムです。 このサブルーチンを書き換えることでポート出力の極性を変更するなど自由に応用出来、必要かつ適切と判断される場合は、データ・メモリー内の上限温度/下限温度を変化させてヒステリシスを作ることも容易です。
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。
最初の設定値、温度制御間隔は1~255の値を入力し、入力値 x 0.5秒が制御間隔になります。 上図の例では、10秒毎に制御出力を更新します。 制御温度の上限及び下限の境界付近では、測定温度が制御範囲の内外を行き来する為、頻繁に制御出力が変化します。 リレー出力などの場合は制御間隔を長めにして接点の動作頻度を落とす必要があります。
次が上限温度で、2桁BCD(06~95)で温度(単位 ℃)を入力します。 三番目が下限温度で同じく(05~94)で単位は℃です。 ただし、上限温度>下限温度に設定する必要があります。
上限温度および下限温度は起動時にテーブル参照(検索)を行い、2桁BCD(温度)から A/D 変換値 HEX を求めてデータ・メモリーに保存し、温度制御に活用しています。
制御間隔毎に測定値を比較し、上限温度と下限温度で仕切られた3つの温度範囲毎に独立した下図サブルーチンを CALL します。
実際にポート出力を変化させて LED を点灯/消灯させているのは上図のプログラムです。 このサブルーチンを書き換えることでポート出力の極性を変更するなど自由に応用出来、必要かつ適切と判断される場合は、データ・メモリー内の上限温度/下限温度を変化させてヒステリシスを作ることも容易です。
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。