「PWM 2 設定」の続きです。 今回はメイン処理で速度を変更している部分の説明です。 <PICデバイス=18F1320> PWM制御対象はマブチモーター RE-140RA ( FET 2SK2232 でドライブ)です。
速度変更と言っても、音声合成LSI が Ready 状態の間は一定のデューティー比でPWM出力し、音声合成LSI が発声中はPWM出力を停止(Low固定)するだけの処理です。
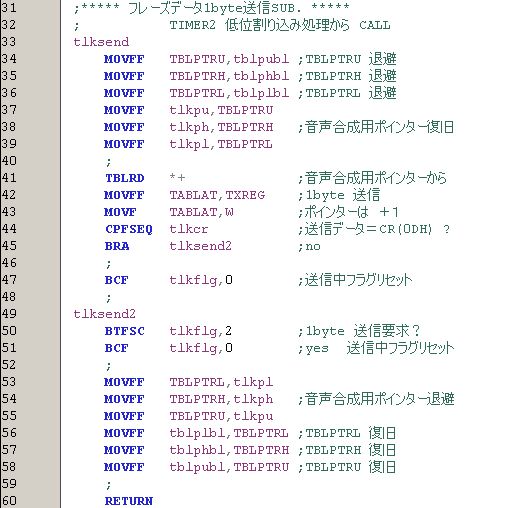
下図が、該当部分のアセンブラ・ソース( test7.asm の一部)です。

音声合成LSI の Ready 状態を確認する際に使っている tlkflg の詳細については、「音声合成LSI 4 フラグ」をご覧下さい。
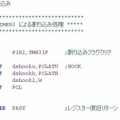
なお、PWM用に TIMER2 を空ける為に TIMER1 をLCD用 2msec 間隔のイベントタイマーにしました。 参考までに TIMER1 を設定してる部分( intdef.asm の一部)を紹介します。 Foscによるイベントタイマーに使う限り、TIMER0 と同様の設定です。

次回、ノイズ対策の話と回路図を紹介して関連記事を終了予定です。
PWM 関連記事のインデックスはこちら → PWM
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。
速度変更と言っても、音声合成LSI が Ready 状態の間は一定のデューティー比でPWM出力し、音声合成LSI が発声中はPWM出力を停止(Low固定)するだけの処理です。
下図が、該当部分のアセンブラ・ソース( test7.asm の一部)です。
音声合成LSI の Ready 状態を確認する際に使っている tlkflg の詳細については、「音声合成LSI 4 フラグ」をご覧下さい。
なお、PWM用に TIMER2 を空ける為に TIMER1 をLCD用 2msec 間隔のイベントタイマーにしました。 参考までに TIMER1 を設定してる部分( intdef.asm の一部)を紹介します。 Foscによるイベントタイマーに使う限り、TIMER0 と同様の設定です。

次回、ノイズ対策の話と回路図を紹介して関連記事を終了予定です。
PWM 関連記事のインデックスはこちら → PWM
「楽々PIC」は楽しい道具を作りながら学ぶブログを目指します。